1 Introduction
With the development of society and the growth of the population, more and more cars are entering our daily lives, and traffic is becoming increasingly crowded. Driving a car is a complex activity, and driving for a long time can easily cause fatigue, which can easily lead to traffic accidents. In addition, some engineering vehicles have a harsh environment and high labor intensity during operation, and driving automation of these vehicles is very necessary. In order to make the driving operation of the car simple, safe and comfortable, and free people from the heavy and boring car driving, all countries in the world are actively researching and developing the automatic driving technology.
Countries such as Germany, the United States, and Japan have conducted active research in the field of automotive automatic driving and have achieved great results. The School of Mechanical and Electrical Engineering of National Defense University of Science and Technology of China has been conducting research on the automatic driving technology of automobiles. The unmanned “Red Flag†CA7460 jointly developed by the First Automobile Group Corporation was successfully tested in Changsha, Hunan Province in June 2003. 130KM / h (the highest level in the United States 100KM / h, Germany 120 KM / h), the maximum speed of 170 KM / h, with safe overtaking ability. However, their system mainly relies on vehicle radar, infrared range finder and image sensor to identify the road surface environment. The obtained road environment information is not rich enough to meet the requirements of intelligent driving, so these systems can only be in the road. Good on-highway applications, unable to adapt to low-grade roads and urban roads with poor road conditions.
Vision is an important function of human beings to observe the world and understand the world. About 75% of the information that humans obtain from the outside world comes from the visual system. In particular, 90% of the information needed by drivers to drive comes from vision. In the current environment sensing means adopted by automobile assisted driving, visual sensors can obtain higher, more accurate and richer road structural environment information than ultrasound, laser radar and the like. With the development of computer technology and the maturity of image processing/recognition technology, machine vision technology has been greatly developed. It is widely used in 3D measurement, 3D reconstruction, virtual reality, moving target detection and target recognition. In the auto-driving surface of a car, a premise problem is the identification of the road condition and the distance between the vehicle and the obstacle, and the speed detection. This problem can be solved to control the driving of the car. Machine vision technology combines 3D measurement and image recognition technology.
At present, the research of machine vision in the field of intelligent robots is in full swing: the detection and tracking of fixed objects based on machine vision based on machine vision proposed by Klaus Fleischer et al; D. Brzakovie et al. proposed the application of road edge detection in mobile robot navigation; O. Djekoune et al. proposed a neural network based visual guided robot navigation. These findings have important implications for the application of machine vision in smart driving.
In this paper, machine vision technology is applied to the automatic driving of vehicles as the main road condition sensing means, which provides a different perspective for the intelligent driving of vehicles.
2, machine vision technology
Since the introduction of MARR visual computing theory, machine vision technology has developed rapidly and is one of the fastest growing technologies in the field of intelligent driving. It is also one of the main research directions in the field of intelligent driving.
2.1 The basic principles of machine vision
Obtaining the distance of each point in the scene from the camera is one of the important tasks of the stereo vision system. The distance of each point in the scene relative to the camera can be represented by a depth map. The machine vision system mainly relies on a dual (multiple) CCD to acquire two (multiple) images at different spatial positions, and generates depth maps by using the depth information and imaging geometry of the two (multiple) images (shown in Figure 1). ).
This article takes a relatively simple and commonly used binocular CCD vision system as an example, and its geometric relationship is shown in the figure. It consists of two identical CCD cameras (cameras), the two image planes are on the same plane, the axes of the two cameras (cameras) are parallel to each other, and the x-axis coincides with the distance between the cameras in the lower x direction. For the ultimate distance B.
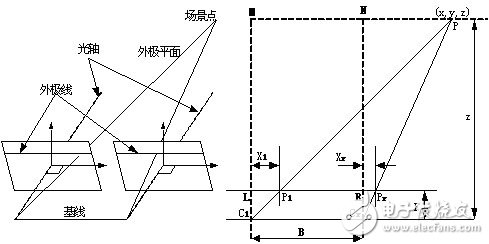
Figure 1 Binocular stereo vision geometric model
In the figure, the projection points of the scene point P in the left and right image planes are P left and P right respectively, assuming that the origin of the coordinate system coincides with the center of the left lens, and the similar triangles PMCl and PlLCl are obtained:
 (1)
(1)
Similarly, from the similar triangles PNCr and PlRCr, we get:
 (2)
(2)
Combine the above two formulas:
 (3)
(3)
Where F is the focal length.
It can be seen from the above that the depth information in various scenes can be realized by calculating the parallax. An important prerequisite for accurate calculation of parallax in the machine vision system is the ability to find conjugate pairs of projection points in the left and right image pairs (the projection points of the same point in different images in the scene are called conjugate pairs). That is, stereo matching. The matching methods mainly include edge feature matching, region feature matching and phase matching. Stereopairing is an important direction in machine vision research. There are many useful research results in this respect. O.Djekoune et al. proposed a new algorithm to improve the matching speed and accuracy of stereo pairs by applying neural network methods.
2.2 Machine vision technology in smart driving applications
In the application of machine vision technology in intelligent driving, machine vision technology must have the characteristics of real-time, robustness and practicality. Real-time requirements require that the data processing of the machine vision system must be synchronized with the high-speed driving of the vehicle; robustness requires intelligent vehicles to different road environments such as highways, city roads, ordinary roads, etc., complex road environments such as road width , color, texture, curve, slope, potholes, obstacles and traffic flow, all kinds of weather, sunny, rain, snow, fog, etc. have good adaptability; practicality means that intelligent vehicles can be accepted by ordinary users.
Currently, machine vision is mainly used for path identification and tracking. Compared with other sensors, machine vision has the advantages of rich information detection, contactless measurement and three-dimensional modeling of road environment, but the data processing is extremely large, and there are system real-time and stability problems, and it is necessary to develop high-performance. Computer hardware, research new algorithms to solve. With the rapid development of computer technology and image processing technology, the three-dimensional reconstruction of the road environment provides powerful information for high-speed intelligent driving of vehicles, and it has realistic feasibility in the near future.
The basic principle of road recognition for machine vision is that the CCD image gray value and the image texture and optical flow of the road pavement environment (white road signs, edges, road color, potholes, obstacles, etc.) are different. According to this difference, the required path image information such as azimuth deviation, lateral deviation, position of the vehicle in the road, and the like can be obtained after image processing. Combining this information with the vehicle's dynamic equations can form a mathematical model of the vehicle control system.
A TPU Screen Protector made of the super toughness of the honeycomb structure. Its unique ultra-soft properties allow it to cover the most complex curves and contours in a device.
The self-healing design of the Hydrogel Screen Protector can protect the display screen of the device from damage, leave no air bubbles, and maintain the sensitivity of the touch screen. Advanced anti-fingerprint and dust- and oleophobic overlays keep your screen smudge- and dirt-free. This overlay is also important in providing maximum touch sensitivity for improved high-speed glide and optimal touch response.
The optical transparency of the Hydrogel Film is more than 90%, showing you the most original screen color and bringing the most realistic visual experience.
If you want to know more about the product information of the Hydrogel Screen Protector for iPhone, please click the product details to view the parameters, model, picture, price and other information of the iPhone Screen Protector.
Whether you are a group or an individual, we will do our best to provide you with accurate and comprehensive information about Hydrogel Screen Protectors!
Screen Protector For iPhone,Hydrogel Film for iPhone,Hydrogel Screen Protector For iPhone,TPU Screen Protector For iPhone,iPhone Screen Protector
Shenzhen Jianjiantong Technology Co., Ltd. , https://www.tpuprotector.com