0 Introduction With the popularity of various vehicle vehicles such as automobiles, the demand for vehicle navigation equipment has become increasingly strong. As a car device. Not only must it have reliable performance, but it also needs to be portable, low power and low price. The design scheme of the GPS navigation terminal that cooperates with the GPS module based on the ARM microprocessor-based embedded system can meet the requirements of this system. To this end, this paper introduces a software and hardware structure and design method of a terminal using GPS9 development board and GPS module to realize GPS navigation function.
This article refers to the address: http://
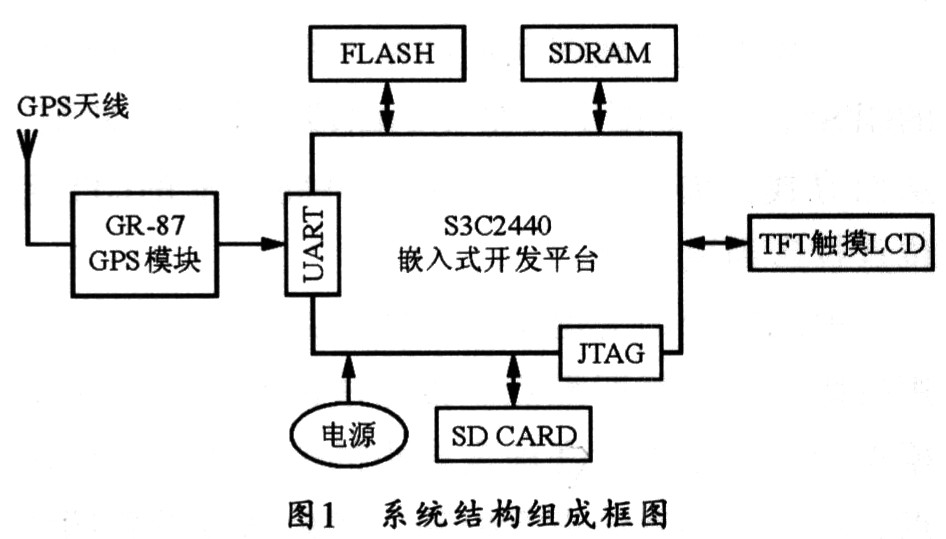
1 GPS navigation system structure The GPS global positioning navigation system introduced in this paper can be divided into five parts: embedded main control module, GPS module, display module, expansion module and power supply module.
The embedded main control module is based on the S3C2440 processor and is mainly responsible for the response, processing and control of the GPS navigation module data. In hardware, the main control module is an embedded development board, including touch LCD interface circuit, SD card interface circuit, FLASH, SDRAM and so on. In the software, the embedded Linux system should be running on the main control module. The main function of the embedded Linux operating system is to manage program module processes and schedule processes.
The GPS module is mainly used to receive navigation satellite data and send it to the main control module in a specific format. The display module can be used with a 3.5-inch TFT with a touch screen LCD, which is mainly used to interact with the user. The expansion module mainly refers to the SD card. The power supply module mainly supplies power to the normal operation of the system. Figure 1 shows the structure of the system.
2 GPS data extraction The output statement of the GR-87 GPS module follows the NMEA-0183 standard. The standard statement starts with "$" to

3 Implementation of navigation maps After obtaining positioning information such as latitude and longitude, it is also necessary to display them visually on an electronic map or other display media, so that it can really play a role in navigation. In order to accurately display it on an electronic map, a certain algorithm is needed to convert, that is, a map matching algorithm.
In general, the basic idea of ​​map matching is to match the GPS trajectory of the vehicle with the vectorized road segment object on the map to find the currently traveling road and project the current GPS positioning point onto the road.
The key to map matching is to determine the matching points, and the projection method can be used to find the matching points. The basic idea of ​​the projection method is to determine the minimum value as the matching point of the projection according to the distance from the point to the line, and use the nearest neighbor method to process, then filter the off-match point by setting the threshold to obtain the preliminary result, thus completing the point-to-line Match.
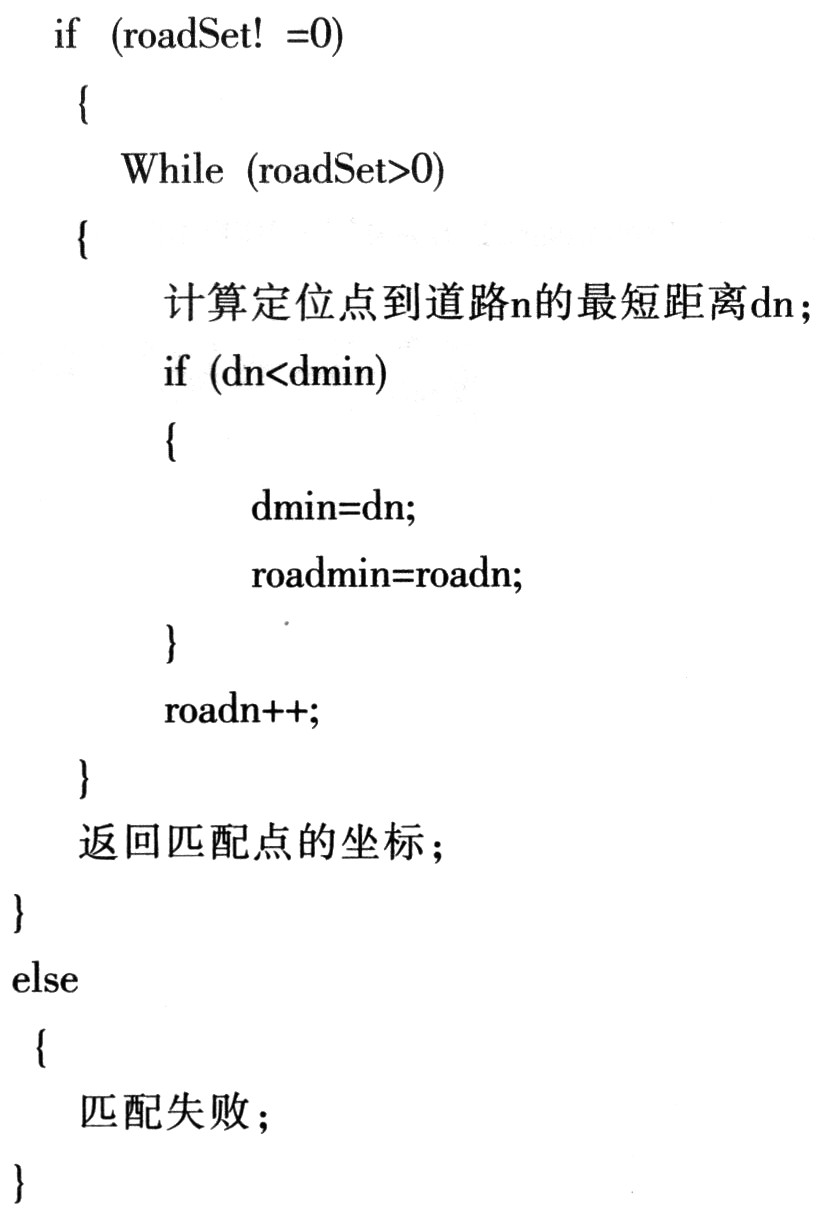
The specific implementation method is to pre-process the road layer, then convert the road into a polygonal line segment, find the current road, then project the current positioning point onto the road, and then find a line segment in the road layer closest to the positioning point, and then Calculate the point where the distance from the point to the line is the shortest, and finally find the road within the error range of each layer.
The basic process code of the algorithm is as follows:
The implementation of the navigation map can be implemented using the embedded graphical interface tool Qt embedded. The graphical interface is a human-computer interaction interface, and the user can understand the navigation information through the screen, or directly operate the touch screen to operate the system, such as zooming the map, viewing the positioning information, and the like.
4 Conclusion Because of its low power consumption and high performance, ARM processors can be widely used in a variety of portable electronic products. Based on the existing electronic products, the design extends the GPS navigation function through an external GPS module, which saves the user without losing too much portability. To this end, the author hopes to use the combination of the ARM development board and the GPS module to implement the GPS navigation function, which can provide a reference for the smart device to extend the GPS function.
Organize your cabling
- Organizes all types of cables
- Ideal for network Patch Panel cabling
- Finger duct design allows easy cable organization
- Cable pass-through holes in the back of the duct
- Only set up 1U rack
- Work with threaded, round and square hole racks
- EIA 19" RACK standard compliable
- Including screws and mounting hardware
Metal Cable Management,1U Metal cable management,stainless steel cable management,metal cable tie mount
NINGBO UONICORE ELECTRONICS CO., LTD , https://www.uniconmelectronics.com