This article is reproduced from: Communication radar electronic warfare, author: Tang Chenliang
Predator UAVs are ideal for a variety of surveillance tasks, such as identifying activities of interest because their video output is easy for the operator to judge. However, due to the narrow field of view of the camera, it can only monitor a small area at a time.
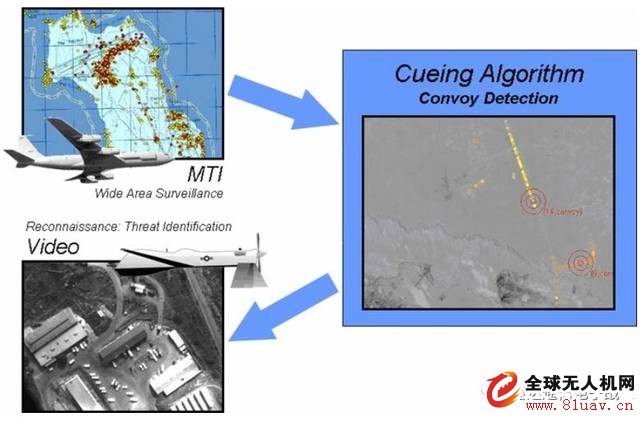
Therefore, the Predator Platform itself is not suitable for search and surveillance in large areas. The Moving Target Indication Radar (MTI) can detect moving objects in a large area. The data it provides can be applied to automated decision support algorithms, but its information content is limited.
Therefore, the onboard MTI monitoring system can detect activity in a large geographical area, but it cannot confirm this activity.
The complementary advantages of these sensing modes were explored by the operator's preliminary research/experiment in the loop. The ability currently being explored is to use the MTI decision support algorithm to alert the Predator drone camera operator.
The algorithm studied was for fleet testing. The automatic decision support algorithm provides the operator with a set of prompts. These tips can provide a location for suspicious activity, especially for the team. The operator uses the prompts to find and identify activities of interest.
However, the algorithm itself does not provide an answer, and a semi-automatic system does not necessarily lead to the desired improvement in human performance.
To do this, the algorithm must provide the drone camera operator with the information available. To solve this problem, we created an integrated sensing and decision support lab, including real-time interactive virtual world simulation, operator-in-the-loop experiments, and distributed data collection environments.
The results provide strong evidence that accurate prompts can improve the effectiveness of drones used to detect military fleet search missions. This article will discuss the experimental framework, as well as the concepts, algorithms, and results of the test.
The problem being solved is the decision support for counter-insurgency, which requires continuous monitoring of large areas, which can be done with MTI data. However, we also need a sensor that clearly identifies potential threats.
MTI data does not provide a clear identification, and for this task the Predator UAV video sensor is an ideal choice because it can be close to the scene, and the video data operator it provides is easy to judge. .
However, due to the narrow field of view of the Predator drone video sensor, it is not possible to effectively survey large areas. Therefore, we hope to use the complementary advantages of these two sensing modes to network them and use MTI data to alert drone camera operators to the direction.
The cue algorithm is the key to coordinating MTI and predator drone video sensors. In order to detect signs of suspicious activity (fleet), the prompt algorithm mines MTI data and uses these signs to prompt the drone camera operator to pay attention. In this experiment, we used a fleet inspection algorithm developed using MTI radar data collected in the "silent hammer experiment" of the Lincoln Multitasking ISR Experimental Platform (LiMIT).
Our goal is to enable Predator drones to effectively survey large areas with their own recognition capabilities. We are studying how we can do our best. In the experiment we measured how a predator can better survey an area compared to a non-prompted tool.
The first component of our construction environment is ground vehicle simulation. We simulated the situation of the fleet and riot vehicles. Next, we simulated a moving target indicating radar (MTI). MTI is a radar processing technology that enables rapid surveying of a wide area and detection of moving vehicles.
The MTI data is then passed to the hint algorithm. The prompting algorithm automatically analyzes the data and provides an indication of the activity of interest. For example, if we are using a fleet inspection algorithm, the hint algorithm will indicate a suspicious fleet.
Fast Recovery Diode (FRD) is a semiconductor diode with good switching characteristics and short reverse recovery time. It is mainly used in switching power supplies, PWM pulse width modulators, inverters and other electronic circuits as high-frequency rectifier diodes. Free-wheeling or damper diodes are used. The internal structure of the fast recovery diode is different from that of an ordinary PN junction diode. It belongs to a PIN junction diode, that is, a base region I is added between the P-type silicon material and the N-type silicon material to form a PIN silicon wafer. Since the base area is thin and the reverse recovery charge is small, the fast recovery diode has a short reverse recovery time, a low forward voltage drop, and a high reverse breakdown voltage (withstanding voltage).

Fast Recovery Stud Diode,Stud Type Fast Recovery Diode,Fast Recovery Diode,Stud Rectifier Power Diode
YANGZHOU POSITIONING TECH CO., LTD. , https://www.pst-thyristor.com