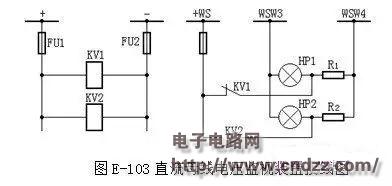
1ã€å›¾E-103为直æµæ¯çº¿ç”µåŽ‹ç›‘视装置电路图,请说明其作用。
ç”:直æµæ¯çº¿ç”µåŽ‹ç›‘视装置主è¦æ˜¯åæ˜ ç›´æµç”µæºç”µåŽ‹çš„高低。KV1是低电压监视继电器,æ£å¸¸ç”µåŽ‹KV1励ç£ï¼Œå…¶å¸¸é—触点æ–开,当电压é™ä½Žåˆ°æ•´å®šå€¼æ—¶ï¼Œ KV1失ç£ï¼Œå…¶å¸¸é—触点é—åˆï¼Œ HP1å…‰å—牌亮,å‘出音å“ä¿¡å·ã€‚KV2是过电压继电器,æ£å¸¸ç”µåŽ‹æ—¶KV2失ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹åœ¨æ–å¼€ä½ç½®ï¼Œå½“电压过高超过整定值时KV2励ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹é—åˆï¼Œ HP2å…‰å—牌亮,å‘出音å“ä¿¡å·ã€‚
2.说明图E-104ç›´æµç»ç¼˜ç›‘视装置接线图å„元件的作用。
ç”:图E-108是常用的ç»ç¼˜ç›‘察装置接线图,æ£å¸¸æ—¶ï¼Œç”µåŽ‹è¡¨1PV开路,而使ST1的触点5-7ã€9-11( ST1çš„1-3ã€2-4æ–å¼€)与ST2的触点9-11接通,投入接地继电器KA。当æ£æžæˆ–è´Ÿæžç»ç¼˜ä¸‹é™åˆ°ä¸€å®šå€¼æ—¶ï¼Œç”µæ¡¥ä¸å¹³è¡¡ä½¿KA动作,ç»KM而å‘出信å·(è‹¥æ£ã€è´Ÿæžå¯¹åœ°çš„ç»ç¼˜ç”µé˜»ç›¸ç‰æ—¶ï¼Œä¸ç®¡ç»ç¼˜ä¸‹é™å¤šå°‘,KAä¸å¯èƒ½åŠ¨ä½œï¼Œå°±ä¸èƒ½å‘出信å·ï¼Œè¿™æ˜¯å…¶ç¼ºç‚¹)。æ¤æ—¶ï¼Œå¯ç”¨2PV进行检查,确定是哪一æžçš„ç»ç¼˜ä¸‹é™(测“+â€å¯¹åœ°æ—¶ï¼ŒST2çš„2-1ã€6-5接通;测“-â€å¯¹åœ°æ—¶ï¼ŒST2çš„1-4ã€5-8接通。æ£å¸¸æ—¶ï¼Œæ¯çº¿ç”µåŽ‹è¡¨è½¬æ¢å¼€å…³ST2çš„2-1ã€5-8ã€9-11接通,电压表2PVå¯æµ‹æ£ã€è´Ÿæ¯çº¿é—´ç”µåŽ‹ï¼ŒæŒ‡ç¤ºä¸º220V。),
è‹¥æ£æžå¯¹åœ°ç»ç¼˜ä¸‹é™ï¼Œåˆ™æŠ•ST1 I档,其触点1-3ã€13-14接通,调节R3至电桥平衡电压表1PV指示为零ä¼;å†å°†ST1投至II档,æ¤æ—¶å…¶è§¦ç‚¹2-4ã€14-15接通,å³å¯ä»Ž1PV上读出直æµç³»ç»Ÿçš„对地总ç»ç¼˜ç”µé˜»å€¼ã€‚若为负æžå¯¹åœ°ç»ç¼˜ä¸‹é™ï¼Œåˆ™å…ˆå°†ST1放在II档,调节3R至电桥平衡,å†å°†ST1投至I档,读出直æµç³»ç»Ÿçš„对地总ç»ç¼˜ç”µé˜»å€¼ã€‚å‡å¦‚æ£æžå‘生接地,则æ£æžå¯¹åœ°ç”µåŽ‹ç‰äºŽé›¶ã€‚而负æžå¯¹åœ°æŒ‡ç¤ºä¸º220V,å之当负æžå‘生接地时,情况与之相å。电压表1PV用作测é‡ç›´æµç³»ç»Ÿçš„总ç»ç¼˜ç”µé˜»ï¼Œç›˜é¢ä¸Šç”»æœ‰ç”µé˜»åˆ»åº¦ã€‚
由于在这ç§ç»ç¼˜ç›‘察装置ä¸æœ‰ä¸€ä¸ªäººå·¥æŽ¥åœ°ç‚¹ï¼Œä¸ºé˜²å…¶å®ƒç»§ç”µå™¨è¯¯åŠ¨ï¼Œè¦æ±‚电æµç»§ç”µå™¨KA有足够大的电阻值,一般选30kΩ,而其å¯åŠ¨ç”µæµä¸º1.4mA,当任一æžç»ç¼˜ç”µé˜»ä¸‹é™åˆ°20 kΩ时,å³èƒ½å‘出信å·ã€‚对地ç»ç¼˜ä¸‹é™å’Œå‘生接地是两ç§æƒ…况。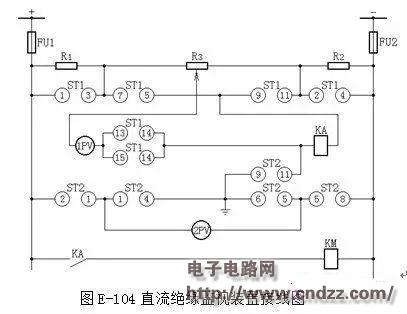
3ã€æ ¹æ®å›¾E-105分别说明A点与C点;B点与C点;A点与B点或A点与D点åŒæ—¶å‘生接地时有什么å±å®³ã€‚
ç”:直æµç³»ç»Ÿåœ¨å˜ç”µç«™ä¸å…·æœ‰é‡è¦çš„ä½ç½®ã€‚è¦ä¿è¯ä¸€ä¸ªå˜ç”µç«™é•¿æœŸå®‰å…¨è¿è¡Œï¼Œå…¶å› ç´ æ˜¯å¤šæ–¹é¢çš„,其ä¸ç›´æµç³»ç»Ÿçš„ç»ç¼˜é—®é¢˜æ˜¯ä¸å®¹å¿½è§†çš„。å˜ç”µç«™çš„ç›´æµç³»ç»Ÿæ¯”较å¤æ‚,通过电缆沟与室外é…电装置的端å排ã€ç«¯åç®±ã€æ“作机构箱ç‰ç›¸è¿žæŽ¥ï¼Œå› ç”µç¼†ç ´æŸã€ç»ç¼˜è€åŒ–ã€å—æ½®ç‰åŽŸå› å‘生接地的å¯èƒ½æ€§è¾ƒå¤šï¼Œå‘生一æžæŽ¥åœ°æ—¶ï¼Œç”±äºŽæ²¡æœ‰çŸè·¯ç”µæµï¼Œç†”æ–器ä¸ä¼šç†”æ–,ä»å¯ç»§ç»è¿è¡Œï¼Œä½†ä¹Ÿå¿…é¡»åŠæ—¶å‘现ã€åŠæ—¶æ¶ˆé™¤ã€‚通常,è¦æ±‚ç›´æµç³»ç»Ÿçš„å„ç§å°æ¯çº¿ã€ç«¯å回路ã€äºŒæ¬¡ç”µç¼†å¯¹åœ°çš„ç»ç¼˜ç”µé˜»å€¼ï¼Œç”¨500V摇表测é‡å…¶å€¼ä¸å¾—å°äºŽ0.5MΩ。直æµå›žè·¯ç»ç¼˜çš„好åå¿…é¡»ç»å¸¸åœ°è¿›è¡Œç›‘视。å¦åˆ™ï¼Œä¼šç»™è¿è¡Œå¸¦æ¥è®¸å¤šä¸å®‰å…¨å› ç´ ã€‚
现以图E-105为例说明直æµæŽ¥åœ°çš„å±å®³ã€‚当图ä¸A点与C点åŒæ—¶æœ‰æŽ¥åœ°å‡ºçŽ°æ—¶ï¼Œç‰äºŽ+WCã€-WC通过大地形æˆçŸè·¯å›žè·¯ï¼Œå¯èƒ½ä¼šä½¿ç†”æ–器FU1å’ŒFU2熔æ–而失去ä¿æŠ¤ç”µæº;当B点与C点åŒæ—¶æœ‰æŽ¥åœ°å‡ºçŽ°æ—¶ï¼Œç‰äºŽå°†è·³é—¸çº¿åœˆçŸè·¯ï¼Œå³ä½¿ä¿æŠ¤æ£å¸¸åŠ¨ä½œï¼ŒYT跳闸线圈çŸè·¯ï¼Œå³ä½¿ä¿æŠ¤æ£å¸¸åŠ¨ä½œï¼ŒYT跳闸线圈也ä¸ä¼šèµ·åŠ¨ï¼Œæ–路器就ä¸ä¼šè·³é—¸ï¼Œå› æ¤åœ¨æœ‰æ•…障的情况下就è¦è¶Šçº§è·³é—¸;当A点与B点或A点与D点,åŒæ—¶æŽ¥åœ°æ—¶ï¼Œå°±ä¼šä½¿ä¿æŠ¤è¯¯åŠ¨ä½œè€Œé€ æˆæ–路器跳闸。直æµæŽ¥åœ°çš„å±å®³ä¸ä»…ä»…æ˜¯ä»¥ä¸Šæ‰€è°ˆçš„å‡ ç‚¹ï¼Œè¿˜æœ‰è®¸å¤šï¼Œåœ¨æ¤ä¸ä¸€ä¸€ä½œä»‹ç»äº†ã€‚
å› ä¸ºå‘生直æµæŽ¥åœ°å°†äº§ç”Ÿè®¸å¤šå®³å¤„,所以对直æµç³»ç»Ÿä¸“门设计一套监视其ç»ç¼˜çŠ¶å†µçš„装置,让它åŠæ—¶åœ°å°†ç›´æµç³»ç»Ÿçš„æ•…éšœæ示给值ç人员,以便迅速检查处ç†ã€‚
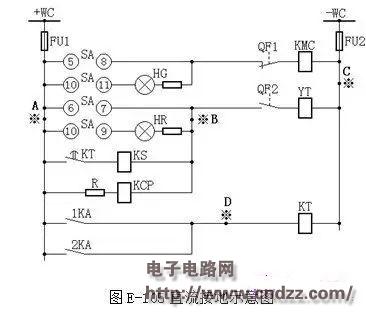
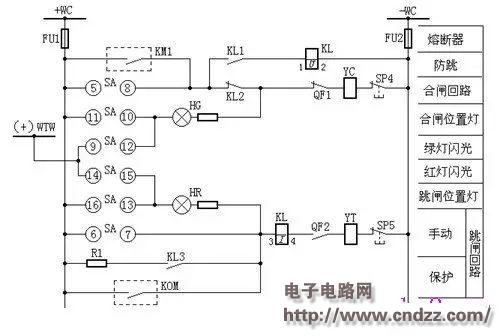
4ã€æ®å›¾E-106具有ç¯å…‰ç›‘视的æ–路器控制回路图(电ç£æ“动机构)说明å„元件的å称,动作过程。
ç”:图ä¸ï¼š+WCã€-WC — 控制æ¯çº¿; FU1ã€FU2—熔æ–器,R1-10/6型,250V; SA — 控制开关,LW2-1a.4.6a.40.20.20/F8åž‹;HG — 绿色信å·ç¯å…·ï¼ŒXD2型,附2500Ω电阻;HR — 红色信å·ç¯å…·ï¼ŒXD2型,附2500Ω电阻;
KL — ä¸é—´ç»§ç”µå™¨ï¼ŒDZB-115/220Våž‹;KMC—接触器; KOM — ä¿æŠ¤å‡ºå£ç»§ç”µå™¨;QF—æ–路器辅助开关;WCL—åˆé—¸å°æ¯çº¿;WSA—事故跳闸å°æ¯çº¿; WS—信å·å°æ¯çº¿;YT—æ–路器跳闸线圈;YC—æ–路器åˆé—¸çº¿åœˆï¼ŒFU1ã€FU2—熔æ–器,RM10-60/25 250V;R1â€”é™„åŠ ç”µé˜»ï¼ŒZG11-25型,1Ω;R2â€”é™„åŠ ç”µé˜»ï¼ŒZG11-25型,1000Ω;(+)WTW—闪光å°æ¯çº¿ã€‚
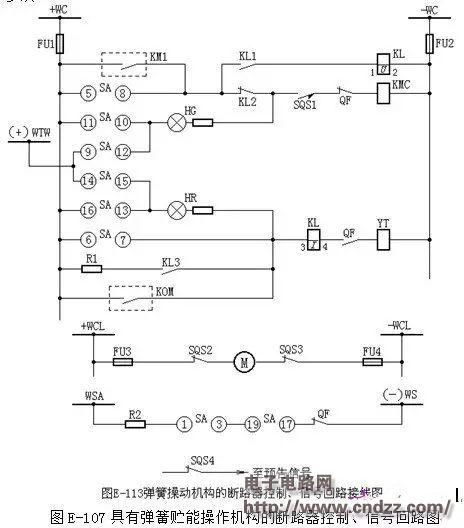
5ã€æ®å›¾E-107具有弹簧贮能æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯å›¾è¯´æ˜Žå„元件的å称,动作过程。
ç”:图E-113为SW4-110åž‹æ–路器é…弹簧æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯ï¼Œåœ¨å…¶åˆé—¸çº¿åœˆä¸ä¸²æœ‰å¼¹ç°§å·²è´®èƒ½é—é”触点SQS1åªæœ‰å¼¹ç°§è´®èƒ½åŽï¼Œæ‰èƒ½åˆé—¸;当设有自动é‡åˆé—¸ï¼Œå¦‚é‡åˆäºŽæ°¸ä¹…性故障时,弹簧æ¥ä¸åŠè´®èƒ½(需9S),故ä¸èƒ½ç¬¬äºŒæ¬¡é‡åˆã€‚为å¯é èµ·è§ï¼Œä»åŠ 了“防跳â€å›žè·¯ã€‚
当KAC由跳闸ä½ç½®ç»§ç”µå™¨çš„KQTå¯åŠ¨æ—¶ï¼ŒKQT线圈的一端应接至SQS与QF之间。如按以往接线,接于SQS之å‰ï¼Œå½“KAC动作,é‡åˆäºŽæ°¸ä¹…性故障åŽï¼Œæ¤æ—¶å¼¹ç°§è´®èƒ½é‡Šæ”¾ï¼ŒSQS打开,KQT失电,æ–å¼€KACçš„å¯åŠ¨å›žè·¯ï¼Œé‡åˆé—¸ç»§ç”µå™¨ä¸çš„电容åˆé‡æ–°å……电足够时,待弹簧é‡æ–°è´®èƒ½åŽï¼ŒSQSé—åˆï¼ŒKQT线圈带电,KACå¯åŠ¨ï¼Œåˆè¿›è¡Œä¸€æ¬¡é‡åˆé—¸ã€‚æ¤ç§æƒ…况,如ä¸åŠæ—¶æ–开控制开关,还会åå¤è¿›è¡Œå¤šæ¬¡ã€‚
6ã€æ®å›¾E-108具有液压æ“作机构的æ–路器控制ã€ä¿¡å·å›žè·¯å›¾è¯´æ˜Žå„元件的å称,动作过程。
ç”:液压机构的工作压力,å„厂家有一定差异,以北京开关厂出å“CY3型为例,在20℃时,é¢å®šè´®æ°”ç’压力为11.7±0.98MPa,é¢å®šåŽ‹åŠ›17.65MPa,当温度å˜åŒ–1℃时,预充压力å˜åŒ–0.045 MPa。
图E-114ä¸ï¼Œå½“液压低于14.72 MPa,åˆé—¸å›žè·¯ä¸çš„压力触点SP4æ–开,ä¸å…许åˆé—¸;当液压低于13.73 MPa,跳闸回路ä¸çš„压力触点SP5æ–开,ä¸å…许跳闸,如电网è¿è¡Œå…许,也å¯ç”¨è¿™ä¸ªè§¦ç‚¹å¯åŠ¨ä¸é—´ç»§ç”µå™¨åŽï¼Œä½œç”¨äºŽè·³é—¸ã€‚
当压力低于15.72 MPa,3SP3触点é—åˆï¼Œå‘出油压é™ä½Žä¿¡å·;当液压低于16.72 MPa时,触点SP1ã€SP2é—åˆï¼Œå¯åŠ¨æ²¹æ³µæ‰“压,当油压上å‡åˆ°18.63 MPa时,SP1ã€SP2å‡æ–开,油泵åœæ¢æ‰“压。当压力低于9.8MPa或高于24.5,MPa时,由压力表的触点PP1ã€PP2å¯åŠ¨KM3å‘出压力异常信å·ï¼Œè¿˜å¯ä»¥åˆ©ç”¨KM3常é—触点é—é”油泵电动机å¯åŠ¨æŽ¥è§¦å™¨çš„å¯åŠ¨å›žè·¯(图ä¸æœªç¤ºå‡º),防æ¢å½“油压é™åˆ°é›¶æ—¶ï¼Œå¯åŠ¨æ²¹æ³µå¯èƒ½é€ æˆæ–路器的慢分事故。

7ã€æ ¹æ®å›¾E-109由两个ä¸é—´ç»§ç”µå™¨æž„æˆçš„闪光装置接线图,说明动作过程。
本文引用地å€ï¼šhttp://
ç”:由两个ä¸é—´ç»§ç”µå™¨æž„æˆçš„闪光装置的原ç†æŽ¥çº¿è§å›¾E-109图所示。当æŸä¸€æ–路器的ä½ç½®ä¸Žå…¶æŽ§åˆ¶å¼€å…³ä¸å¯¹åº”时,闪光æ¯çº¿(+)WTWç»â€œä¸å¯¹åº”â€å›žè·¯ï¼Œä¿¡å·ç¯(HR或HG)åŠæ“作线圈(YT或YC)与负电æºæŽ¥é€šï¼ŒKM1å¯åŠ¨ï¼ŒKM1常开触点é—åˆï¼ŒKM2相继å¯åŠ¨ï¼Œå…¶å¸¸å¼€è§¦ç‚¹å°†KM1线圈çŸæŽ¥ï¼Œå¹¶ä½¿é—ªå…‰æ¯çº¿ç›´æŽ¥ä¸Žæ£å¸¸ç”µæºæ²Ÿé€šï¼Œä¿¡å·ç¯(HR或HG)全亮;当KM1触点延时æ–å¼€åŽï¼ŒKM2失ç£ï¼Œå…¶å¸¸å¼€è§¦ç‚¹æ–开,常é—触点é—åˆï¼ŒKM1å†æ¬¡å¯åŠ¨ï¼Œé—ªå…‰æ¯çº¿(+)WTWç»KM1线圈与æ£ç”µæºæŽ¥é€šï¼Œâ€œä¸å¯¹åº”â€å›žè·¯ä¸çš„ä¿¡å·ç¯å‘ˆåŠäº®ï¼Œé‡å¤ä¸Šè¿°è¿‡ç¨‹ï¼Œä¾¿å‘出连ç»çš„闪光信å·ã€‚KM1åŠKM2带延时å¤ä½ï¼Œæ˜¯ä¸ºäº†ä½¿é—ªå…‰å˜å¾—æ›´åŠ æ˜Žæ˜¾ã€‚
图ä¸ï¼Œè¯•éªŒæŒ‰é’®SEçš„ä¿¡å·ç¯HW用于模拟试验。当æ¿ä¸‹SE时,闪光æ¯çº¿(+)WTWç»ä¿¡å·ç¯HW与负电æºæŽ¥é€šï¼ŒäºŽæ˜¯é—ªå…‰è£…置便按上述顺åºåŠ¨ä½œï¼Œä½¿è¯•éªŒç¯HWå‘出闪光信å·ã€‚HWç»æŒ‰é’®çš„常é—触点接在æ£ã€è´Ÿç”µæºä¹‹é—´ï¼Œå› 而兼作闪光装置熔æ–器的监视ç¯ã€‚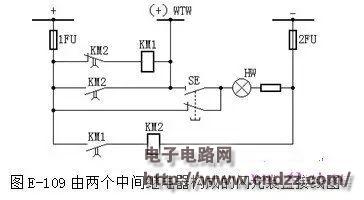
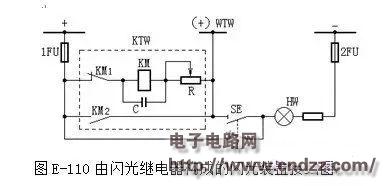
8ã€æ ¹æ®å›¾E-110说明闪光装置接线的构æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:图E-110ä¸ï¼Œç”±KMã€Rã€C组æˆé—ªå…‰ç»§ç”µå™¨ã€‚按下按钮SE时,它相当于一个ä¸å¯¹åº”回路,闪光æ¯çº¿ä¸Žè´Ÿç”µæºæŽ¥é€šï¼Œé—ªå…‰ç»§ç”µå™¨KTW的线圈回路接通 ,电容器Cç»é™„åŠ ç”µé˜»R和“ä¸å¯¹åº”â€å›žè·¯ä¸çš„ä¿¡å·ç¯å……ç”µï¼ŒäºŽæ˜¯åŠ åœ¨KM两端的电压ä¸æ–å‡é«˜ï¼Œå½“达到其动作电压时,KM动作,其常开触点KM.2é—åˆï¼Œé—ªå…‰æ¯çº¿(+)WTW与æ£ç”µæºç›´æŽ¥æŽ¥é€šï¼Œä¿¡å·ç¯å…¨äº®ã€‚åŒæ—¶å…¶å¸¸é—触点KM.1æ–开它的线圈回路,电容C 便放电,放电åŽï¼Œç”µå®¹C 的端电压é€æ¸é™ä½Žï¼Œå¾…é™è‡³KM的返回电压时,KMå¤å½’,KM.2æ–开,KM.1é—åˆï¼Œé—ªå…‰æ¯çº¿ç»KMã€KM.1与æ£ç”µæºæŽ¥é€šï¼Œä¿¡å·ç¯å‘ˆåŠäº®ã€‚é‡å¤ä¸Šè¿°è¿‡ç¨‹ï¼Œä¾¿å‘出连ç»é—ªå…‰ã€‚
9ã€æ ¹æ®å›¾E-111说明å„符å·å…ƒä»¶çš„å称åŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:常用ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçš„事故信å·è£…置。所谓 ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçš„事故信å·ï¼Œæ˜¯æŒ‡æ–路器自动跳闸åŽï¼Œä¸ºä½¿å€¼ç人员ä¸å—音å“ä¿¡å·é•¿æœŸå¹²æ‰°è€Œå½±å“事故处ç†ï¼Œå¯ä»¥ä¿ç•™ç»¿ç¯é—ªå…‰ä¿¡å·è€Œä»…将音å“ä¿¡å·ç«‹å³è§£é™¤ã€‚
图E-111ä¸KSP1为ZC—23型冲击继电器,脉冲å˜æµå™¨T一次侧并è”的二æžç®¡V和电容器C起抗干扰作用;二次侧并è”的二æžç®¡V的作用是将T的一次侧电æµçªç„¶å‡å°è€Œåœ¨äºŒæ¬¡ä¾§æ„Ÿåº”的电æµæ—路,使干簧继电器KRä¸è¯¯åŠ¨(å› å¹²ç°§ç»§ç”µå™¨åŠ¨ä½œæ²¡æœ‰æ–¹å‘性)。其原ç†æ˜¯å½“æ–路器事故分闸或按下试验按钮SE1时,脉冲å˜æµå™¨T一次绕组ä¸æœ‰ç”µæµå¢žé‡ï¼ŒäºŒæ¬¡ç»•ç»„ä¸æ„Ÿåº”电æµèµ·åŠ¨KR,KR动作åŽèµ·åŠ¨ä¸é—´ç»§ç”µå™¨KM。KM有两对触点,一对触点é—åˆèµ·åŠ¨èœ‚鸣器HB,å‘出音å“ä¿¡å·;å¦ä¸€å¯¹è§¦ç‚¹é—åˆèµ·åŠ¨æ—¶é—´ç»§ç”µå™¨KT1,ç»ä¸€å®šå»¶æ—¶åŽï¼ŒKT1起动KM1,KM1动作åŽï¼Œä½¿KM失ç£è¿”回,于是音å“åœæ¢ï¼Œæ•´ä¸ªäº‹æ•…ä¿¡å·å›žè·¯æ¢å¤åˆ°åŽŸå§‹çŠ¶æ€ã€‚

准备第二å°æ–路器跳闸时å‘出音å“,ä¸å¯¹åº”å¯åŠ¨å›žè·¯å¦‚图E-112。图E-111ä¸å¸¸å¼€è§¦ç‚¹KM2是由预告信å·è£…置引æ¥çš„(è§å›¾E-113),所以自动解除音å“用的时间继电器KT1å’Œä¸é—´ç»§ç”µå™¨KM1为两套音å“ä¿¡å·è£…置所共用。
为能试验事故音å“装置的完好与å¦ï¼Œå¦è®¾æœ‰è¯•éªŒæŒ‰é’®SE1,按SE1时,å³å¯å¯åŠ¨KSP1,使装置å‘出音å“并按上述程åºå¤å½’至原始状æ€ã€‚
按下手动å¤å½’按钮也å¯ä½¿éŸ³å“ä¿¡å·è§£é™¤ã€‚
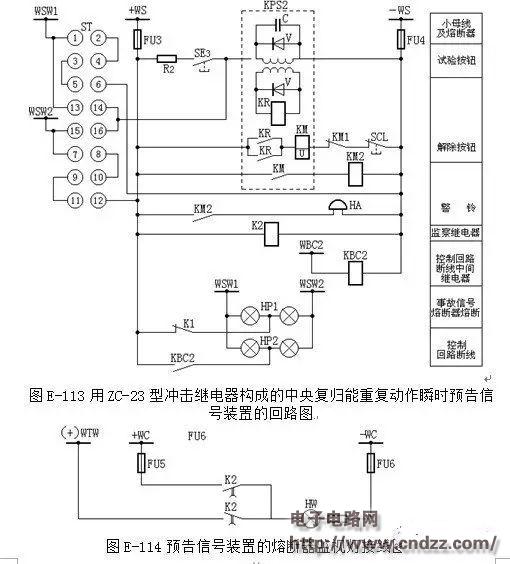
10ã€æ ¹æ®å›¾E-113说明å„符å·å…ƒä»¶çš„å称åŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:预告信å·è£…置是当设备å‘生故障或æŸäº›ä¸æ£å¸¸è¿è¡Œæƒ…况时能自动å‘出音å“和光å—牌ç¯å…‰ä¿¡å·çš„装置。它å¯å¸®åŠ©è¿è¡Œäººå‘˜åŠæ—¶åœ°å‘现故障åŠéšæ‚£ï¼Œä»¥ä¾¿é‡‡å–é€‚å½“æŽªæ–½åŠ ä»¥å¤„ç†ï¼Œé˜²æ¢äº‹æ•…扩大。å˜ç”µæ‰€å¸¸è§çš„预告信å·æœ‰ï¼šå˜åŽ‹å™¨è½»ç“¦æ–¯åŠ¨ä½œã€å˜åŽ‹å™¨è¿‡è´Ÿè·ã€å˜åŽ‹å™¨æ²¹æ¸©è¿‡é«˜ã€ç”µåŽ‹äº’感器二次回路æ–线ã€ç›´æµå›žè·¯ç»ç¼˜é™ä½Žã€æŽ§åˆ¶å›žè·¯æ–线ã€äº‹æ•…音å“ä¿¡å·å›žè·¯ç†”æ–器熔æ–ã€ç›´æµç”µåŽ‹è¿‡é«˜æˆ–过低ç‰ã€‚
预告信å·ä¸€èˆ¬å‘自å„ç§ç›‘测è¿è¡Œå‚æ•°çš„å•ç‹¬ç»§ç”µå™¨ï¼Œä¾‹å¦‚过负è·ä¿¡å·ç”±è¿‡è´Ÿè·ä¿æŠ¤ç»§ç”µå™¨å‘出。
预告信å·åˆ†çž¬æ—¶é¢„å‘Šä¿¡å·å’Œå»¶æ—¶ä¿¡å·ä¸¤ç§ï¼Œå¯¹æŸäº›å½“电力系统ä¸å‘生çŸè·¯æ•…éšœå¯èƒ½ä¼´éšå‘出的预告信å·ï¼Œä¾‹å¦‚:过负è·ã€ç”µåŽ‹äº’感器二次回路æ–线ç‰ï¼Œéƒ½åº”带延时å‘出,其延时应大于外部çŸè·¯çš„最大切除时é™ã€‚è¿™æ ·ï¼Œåœ¨å¤–éƒ¨çŸè·¯åˆ‡é™¤åŽï¼Œè¿™äº›ç”±ç³»ç»ŸçŸè·¯æ‰€å¼•èµ·çš„异常就会自动消失,而ä¸è®©å®ƒå‘出è¦æŠ¥ä¿¡å·ï¼Œä»¥å…分散è¿è¡Œäººå‘˜çš„注æ„力。
ç›®å‰ï¼Œå¹¿æ³›é‡‡ç”¨çš„ä¸å¤®å¤å½’带é‡å¤åŠ¨ä½œçš„预告信å·è£…置,其动作原ç†ä¸Žäº‹æ•…音å“ä¿¡å·è£…置相åŒï¼Œæ‰€ä¸åŒçš„是åªæ˜¯ç”¨å…‰å—牌ç¯æ³¡ä»£æ›¿äº†äº‹æ•…音å“ä¿¡å·è£…ç½®ä¸å¯¹åº”å¯åŠ¨å›žè·¯ä¸çš„电阻R,并用è¦é“ƒä»£æ›¿äº†èœ‚鸣器,图E-118所示为由ZC-23型冲击继电器构æˆçš„ä¸å¤®å¤å½’能é‡å¤åŠ¨ä½œçž¬æ—¶é¢„å‘Šä¿¡æ¯è£…置接线图,其动作原ç†ä¸Žå›¾E-111相似,图ä¸KM1由图E-117引æ¥ï¼Œç”¨ä»¥è‡ªåŠ¨è§£é™¤éŸ³å“,WSW1å’ŒWSW2为瞬时预告å°æ¯çº¿ã€‚
当设备å‘生ä¸æ£å¸¸æƒ…况时,例如控制回路æ–线,则KBC2动作,其常开触点é—åˆï¼Œé€šè¿‡å›žè·¯+WS KBC2常开触点 HP2 WSW1å’ŒWSW2
ST13-14 ST15-16 KSP2 -WS,使KSP2动作,触点KM2é—åˆï¼Œä½¿è¦é“ƒHAå‘出音å“ä¿¡å·ï¼ŒåŒæ—¶å…‰å—牌HP2示出“控制回路æ–线â€ä¿¡å·ï¼ŒæŒ‰ä¸‹è§£é™¤æŒ‰é’®SCL,音å“å³å¯è§£é™¤(也å¯ç»ä¸€å®šå»¶æ—¶ï¼Œè‡ªåŠ¨è§£é™¤),而光å—牌信å·ç›´åˆ°æ•…障消除,KBC2触点返回æ‰ä¼šæ¶ˆå¤±ã€‚由于采用了ZC-23åž‹ç»§ç”µå™¨ï¼Œå› è€Œä¿¡å·æ˜¯å¯ä»¥é‡å¤åŠ¨ä½œçš„。为能ç»å¸¸æ£€æŸ¥å…‰å—牌ç¯æ³¡çš„完好性,设有转æ¢å¼€å…³ST。处于“åˆâ€ä½æ—¶ï¼ŒST触点1-2ã€3-4ã€5-6ã€7-8ã€9-10ã€11-12全接通,分别将信å·ç”µæº+WSå’Œ-WS接至å°æ¯çº¿WSW2å’ŒWSW1,使光å—牌所有的ç¯æ³¡äº®ã€‚å‘预告信å·æ—¶ï¼Œä¸¤åªç¯æ³¡æ˜¯å¹¶è”的,ç¯æ³¡æ˜Žäº®ï¼Œå½“å…¶ä¸ä¸€åªç¯æ³¡æŸå时,ä»èƒ½ä¿è¯å‘出信å·ã€‚而试验光å—牌时,两åªç¯æ³¡åˆ™æ˜¯ä¸²è”çš„ï¼Œå› è€Œç¯å…‰è¾ƒæš—,æ¤æ—¶è‹¥ä¸€åªç¯æ³¡æŸå则该光å—牌å³ä¸äº®ã€‚
预告信å·è£…置由å•ç‹¬çš„熔æ–器FU3ã€FU4供电,若FU3或FU4熔æ–则ä¸èƒ½å‘出预告信å·ï¼Œæ‰€ä»¥å¯¹ç†”æ–器电æºé‡‡ç”¨äº†ç¯å…‰ç›‘视的方法。图E-119为预告信å·è£…置的熔æ–器监视ç¯æŽ¥çº¿å›¾ã€‚æ£å¸¸è¿è¡Œæ—¶ï¼Œç†”æ–器监视继电器K2带电,其常开触点é—åˆï¼Œä¸å¤®ä¿¡å·å±ä¸Šçš„白色指示ç¯HW亮;当FU3熔æ–时,K2失电,其常é—触点é—åˆï¼ŒHW被接至闪光å°æ¯çº¿(+)WTW上å‘出闪光。
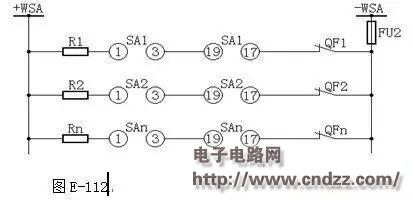
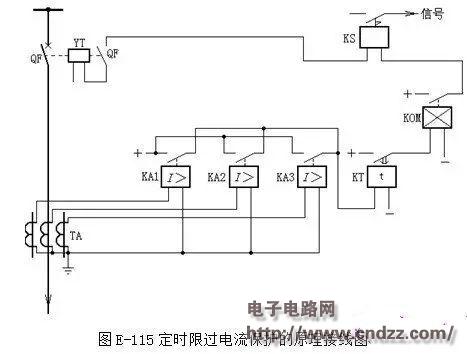
11ã€æ ¹æ®å›¾E-115说明线路定时é™è¿‡ç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:如图E-115,当被ä¿æŠ¤çº¿è·¯å‘生故障时,çŸè·¯ç”µæµç»ç”µæµäº’感器TAæµå…¥KA1—KA3,çŸè·¯ç”µæµå¤§äºŽç”µæµç»§ç”µå™¨æ•´å®šå€¼æ—¶ï¼Œç”µæµç»§ç”µå™¨å¯åŠ¨ã€‚å› ä¸‰åªç”µæµç»§ç”µå™¨è§¦ç‚¹å¹¶è”,所以åªè¦ä¸€åªç”µæµç»§ç”µå™¨è§¦ç‚¹é—åˆï¼Œä¾¿å¯åŠ¨æ—¶é—´ç»§ç”µå™¨KT,按预先整定的时é™ï¼Œå…¶è§¦ç‚¹é—åˆï¼Œå¹¶å¯åŠ¨å‡ºå£ä¸é—´ç»§ç”µå™¨KOM。KOM动作åŽï¼ŒæŽ¥é€šè·³é—¸å›žè·¯ï¼Œä½¿QFæ–路器跳闸,åŒæ—¶ä½¿ä¿¡å·ç»§ç”µå™¨åŠ¨ä½œå‘出动作信å·ã€‚由于ä¿æŠ¤çš„动作时é™ä¸ŽçŸè·¯ç”µæµçš„大å°æ— 关,是固定的,固称为定时é™è¿‡ç”µæµã€‚
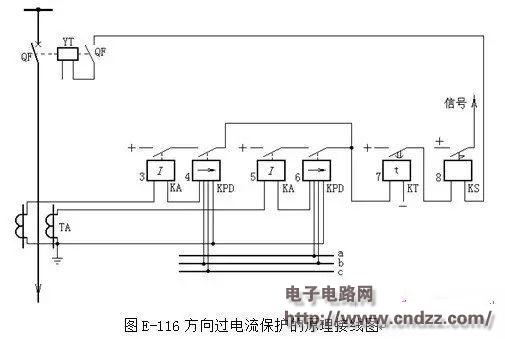
12ã€æ ¹æ®å›¾E-116说明线路方å‘过电æµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:方å‘过æµçš„ä¿æŠ¤åŽŸç†æŽ¥çº¿å¦‚图E-116所示,电æµç»§ç”µå™¨3ã€5是å¯åŠ¨å…ƒä»¶ï¼ŒåŠŸçŽ‡æ–¹å‘继电器4ã€6是方å‘元件,采用90°接线(UbcIAåŠUabIc)。å„相电æµç»§ç”µå™¨çš„触点和对应功率方å‘继电器触点串è”,以达到按相å¯åŠ¨çš„作用。时间继电器7是使ä¿æŠ¤è£…置获得必è¦çš„动作时é™ï¼Œå…¶è§¦ç‚¹é—åˆï¼Œç»ä¿¡å·ç»§ç”µå™¨8å‘出跳闸脉冲,使æ–路器QF跳闸。
æ–¹å‘过电æµä¿æŠ¤ï¼Œç”±äºŽåŠ 装了功率方å‘ç»§ç”µå™¨ï¼Œå› æ¤çº¿è·¯å‘生çŸè·¯æ—¶ï¼Œè™½ç„¶ç”µæµç»§ç”µå™¨éƒ½å¯èƒ½åŠ¨ä½œï¼Œä½†åªæœ‰æµå…¥åŠŸçŽ‡æ–¹å‘继电器的电æµä¸ŽåŠŸçŽ‡æ–¹å‘继电器规定的方å‘一致时(当规定指å‘线路时,å³ä¸€æ¬¡ç”µæµä»Žæ¯çº¿æµå‘线路时),功率方å‘继电器æ‰åŠ¨ä½œï¼Œä»Žè€Œä½¿æ–路器跳闸。而当æµå…¥åŠŸçŽ‡æ–¹å‘继电器的电æµä¸ŽåŠŸçŽ‡æ–¹å‘继电器规定的方å‘相åæ—¶(å³ä¸€æ¬¡ç”µæµä»Žçº¿è·¯æµå‘æ¯çº¿æ—¶),功率方å‘继电器ä¸åŠ¨ä½œï¼Œå°†æ–¹å‘过电æµä¿æŠ¤é—é”,ä¿è¯äº†æ–¹å‘过电æµä¿æŠ¤çš„选择性。
在æ£å¸¸è¿è¡Œæ—¶ï¼Œè´Ÿè·ç”µæµçš„æ–¹å‘也å¯èƒ½ç¬¦åˆåŠŸçŽ‡æ–¹å‘继电器的动作方å‘,其触点é—åˆï¼Œä½†æ¤æ—¶ç”µæµç»§ç”µå™¨æœªåŠ¨ä½œï¼Œæ‰€ä»¥æ•´å¥—æ–¹å‘过电æµä¿æŠ¤ä»è¢«é—é”ä¸åŠ¨ä½œã€‚
æ–¹å‘过电æµä¿æŠ¤çš„动作时é™ï¼Œæ˜¯å°†åŠ¨ä½œæ–¹å‘一致的ä¿æŠ¤ï¼ŒæŒ‰é€†å‘阶梯原则进行整定的。
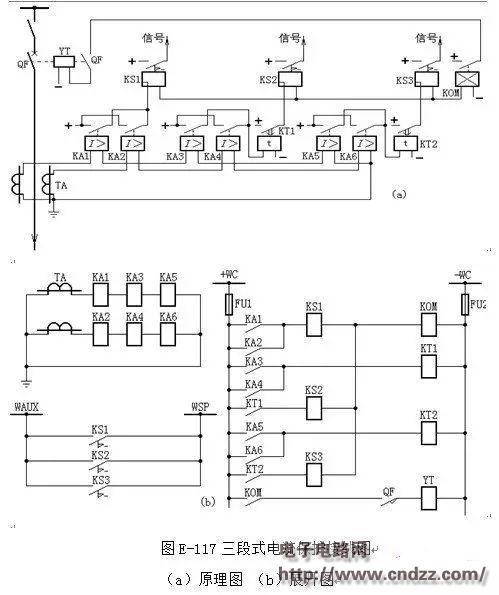
13ã€æ ¹æ®å›¾E-117说明输电线路三段å¼ç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:线路三段å¼ç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å›¾åŠå±•å¼€å›¾å¦‚图E-117所示。其ä¸KA1ã€KA2ã€KS1æž„æˆç¬¬â… 段瞬时电æµé€Ÿæ–;KA3ã€KA4ã€KT1ã€KS2æž„æˆç¬¬â…¡æ®µé™æ—¶ç”µæµé€Ÿæ–;KA5ã€KA6ã€KT2ã€KS3æž„æˆç¬¬â…¢æ®µå®šæ—¶é™è¿‡ç”µæµã€‚三段ä¿æŠ¤å‡ä½œç”¨äºŽä¸€ä¸ªå…¬å…±çš„出å£ä¸é—´ç»§ç”µå™¨KOM,任何一段ä¿æŠ¤åŠ¨ä½œå‡å¯åŠ¨KOM,使æ–路器跳闸,åŒæ—¶ç›¸åº”段的信å·ç»§ç”µå™¨åŠ¨ä½œæŽ‰ç‰Œï¼Œå€¼ç人员便å¯ä»Žå…¶æŽ‰ç‰ŒæŒ‡ç¤ºåˆ¤æ–是哪套ä¿æŠ¤åŠ¨ä½œï¼Œè¿›è€Œå¯¹æ•…障的大概范围作出判æ–。
14ã€æ ¹æ®å›¾E-118说明线路三段å¼é›¶åºç”µæµä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
ç”:三段å¼é›¶åºç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å¦‚图E-118,在被ä¿æŠ¤çº¿è·¯çš„三相上分别装设型å·å’Œå˜æ¯”完全相åŒçš„电æµäº’感器,将它们的二次绕组互相并è”,然åŽæŽ¥è‡³ç”µæµç»§ç”µå™¨çš„线圈。当æ£å¸¸è¿è¡Œå’Œå‘生相间故障时,电网ä¸æ²¡æœ‰é›¶åºç”µæµï¼Œæ•…IR=0,继电器ä¸åŠ¨ä½œï¼Œåªæœ‰å‘生接地故障时,æ‰å‡ºçŽ°é›¶åºç”µæµï¼Œå¦‚其值超过整定值,继电器就动作。
实际工作ä¸ï¼Œç”±äºŽä¸‰åªç”µæµäº’感器的励ç£ç‰¹æ€§ä¸ä¸€è‡´ï¼Œå½“å‘ç”Ÿç›¸é—´æ•…éšœæ—¶ï¼Œä¼šé€ æˆè¾ƒå¤§çš„ä¸å¹³è¡¡ç”µæµã€‚为了使ä¿æŠ¤è£…置在这ç§æƒ…况下ä¸è¯¯åŠ¨ä½œï¼Œé€šå¸¸å°†ä¿æŠ¤çš„动作电æµæŒ‰èº²è¿‡æœ€å¤§ä¸å¹³è¡¡ç”µæµæ¥æ•´å®šã€‚
与相间çŸè·¯çš„电æµä¿æŠ¤ç›¸åŒï¼Œé›¶åºç”µæµä¿æŠ¤ä¹Ÿé‡‡ç”¨é˜¶æ®µå¼ä¿æŠ¤ï¼Œé€šå¸¸é‡‡ç”¨ä¸‰æ®µå¼ã€‚ç›®å‰çš„“四统一â€ä¿æŠ¤å±åˆ™é‡‡ç”¨å››æ®µå¼ã€‚图E-118为三段å¼é›¶åºç”µæµä¿æŠ¤çš„原ç†æŽ¥çº¿å›¾ã€‚瞬时零åºç”µæµé€Ÿæ–(零åºâ… 段有,由KA1ã€KMå’ŒKS7æž„æˆ),一般å–ä¿æŠ¤çº¿è·¯æœ«ç«¯æŽ¥åœ°çŸè·¯æ—¶ï¼Œæµè¿‡ä¿æŠ¤è£…ç½®3å€æœ€å¤§é›¶åºç”µæµ3Iomçš„1.3å€ï¼Œä¿æŠ¤èŒƒå›´ä¸å°äºŽçº¿è·¯å…¨é•¿çš„15%~25%。
零åºâ…¡æ®µ(ç”±KA3ã€KT4å’ŒKS8æž„æˆ)的整定电æµï¼Œä¸€èˆ¬å–下一级线路的零åºâ… 段整定电æµçš„1.2å€ï¼Œæ—¶é™0.5s,ä¿è¯åœ¨æœ¬çº¿æœ«ç«¯å•ç›¸æŽ¥åœ°æ—¶ï¼Œå¯é 动作。
零åºâ…¢æ®µ(ç”±KA5ã€KT6å’ŒKS9æž„æˆ)的整定电æµå¯å–零åºâ…¡(或Ⅲ)段整定的1.2å€ï¼Œæˆ–大于三相çŸè·¯çš„最大ä¸å¹³è¡¡ç”µæµï¼Œå…¶çµæ•æ€§è¦æ±‚下一级末端故障时,能å¯é 动作。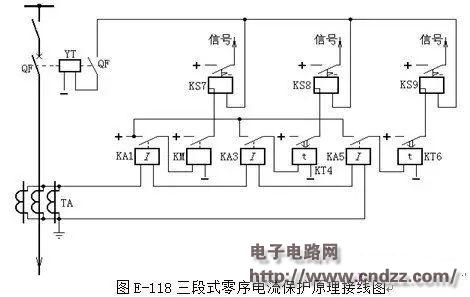
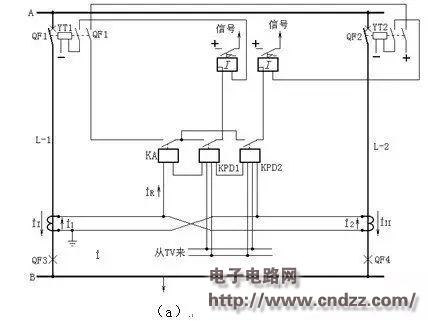
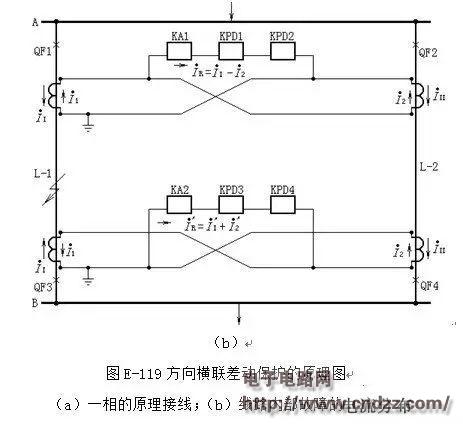
15ã€æ ¹æ®å›¾E-119说明åŒå›žçº¿çš„横è”差动ä¿æŠ¤çš„æž„æˆåŠåŠ¨ä½œè¿‡ç¨‹ã€‚
本文引用地å€ï¼šhttp://
ç”:åŒå›žçº¿æ¨ªè”差动ä¿æŠ¤è£…置是由电æµå¯åŠ¨å…ƒä»¶å’ŒåŠŸçŽ‡æ–¹å‘元件组æˆï¼Œå›¾E-119(a)ä¸ï¼ŒåŠŸçŽ‡æ–¹å‘继电器KPD1å’ŒKPD2的电æµçº¿åœˆä¸Žç”µæµç»§ç”µå™¨KA串è”接于åŒå›žçº¿çš„电æµå·®ä¸Šã€‚功率方å‘继电器KPD1与KPD2åŠ è¿›åŒä¸€ç”µåŽ‹(接æ¯çº¿ç”µåŽ‹äº’感器),但æžæ€§ç›¸å。在I1> I2(å³åŒä¸€å›žçº¿ä¸Šå‘生故障)时,左边的方å‘继电器KPD1的转矩为æ£ï¼Œè€Œå³è¾¹çš„æ–¹å‘继电器KPD2的转矩为负;å之,在I2> I1 (å³å¦ä¸€å›žçº¿ä¸Šå‘生故障)时,KPD2的转矩为æ£ï¼ŒKPD1çš„è½¬çŸ©ä¸ºè´Ÿã€‚è¿™æ ·ä¸¤å›žçº¿è·¯ä¸ä»»ä¸€å›žçº¿è·¯ä¸Šå‘生故障时,电æµç»§ç”µå™¨KAå‡å¯åŠ¨ä¿æŠ¤è£…置,而两个功率方å‘继电器则用æ¥åˆ¤åˆ«æ•…障线路。
æ£å¸¸åŠå¤–部故障时,ⅰ1=â…°2ã€â…°R =0 ã€ä¿æŠ¤ä¸åŠ¨ä½œã€‚
在线路L-1上K点故障时,ⅰ1>â…°2 ,所以ⅰR =â…°1-â…°2>â…°s,电æµç»§ç”µå™¨KA1å¯åŠ¨ï¼ŒåŠŸçŽ‡æ–¹å‘继电器KPD1触点é—åˆï¼ŒKPD2触点ä¸é—åˆï¼Œä¿æŠ¤åŠ¨ä½œè·³å¼€æ–路器QF1。在线路å—端,æµå…¥ç»§ç”µå™¨çš„电æµâ…°R =â…°1+â…°2 [è§å›¾E-119(b)],使电æµç»§ç”µå™¨KA2ã€åŠŸçŽ‡æ–¹å‘继电器KPD3动作,而KPD4ä¸åŠ¨ä½œï¼Œä»Žè€Œä½¿æ–路器QF3跳闸。åŒç†åœ¨çº¿è·¯L-2上çŸè·¯æ—¶ï¼Œé€ç«¯KA1ã€KPD2动作,å—端KA2ã€KPD4动作,åŒæ—¶è·³å¼€æ–路器QF2ã€QF4。
为防æ¢å•å›žçº¿è¿è¡Œæ—¶ï¼Œæ¨ªè”差动ä¿æŠ¤åœ¨å¤–部故障时误动作,ä¿æŠ¤çš„ç›´æµç”µæºç»åŒå›žçº¿ä¸¤ä¸ªå¼€å…³çš„常开辅助触点串è”é—é”,åªæœ‰å½“两个开关åŒæ—¶æŽ¥å…¥æ—¶ï¼Œä¿æŠ¤æ‰ä½œç”¨ã€‚
æ–¹å‘横è”差动ä¿æŠ¤çš„动作电æµåº”大于穿越性故障时在差电æµå›žè·¯ä¸å¼•èµ·çš„最大ä¸å¹³è¡¡ç”µæµã€‚
16ã€æ ¹æ®å›¾E-120说明åŒå›žçº¿ç”µæµå¹³è¡¡ä¿æŠ¤çš„æž„æˆåŠå·¥ä½œæƒ…况。
ç”:电æµå¹³è¡¡ä¿æŠ¤æ˜¯æ¨ªè”差动ä¿æŠ¤çš„å¦ä¸€ç§å½¢å¼ï¼Œå®ƒæ˜¯æŒ‰æ¯”较åŒå›žçº¿è·¯ä¸ç”µæµçš„ç»å¯¹å€¼è€Œå·¥ä½œçš„,如图E-120所示。电æµå¹³è¡¡ç»§ç”µå™¨KBL1ã€KBL2å„有一个工作线圈åŒNw,一个制动线圈åŒNB和一个电压线圈åŒNv。KBL1的工作线圈接于线路L-1电æµäº’感器的二次侧,由电æµI1产生动作力矩Mw1,其制动线圈接于线路L-2电æµäº’感器的二次侧,由电æµI1产生动作力矩MB1。KBL2的工作线圈接于线路L-2电æµäº’感器的二次侧,由I2产生动作力矩Mw2,其制动线圈接于线路L-1电æµäº’感器的二次侧,由I1产生动作力矩MB2。KBL1ã€KBL2的电压线圈å‡æŽ¥äºŽæ¯çº¿ç”µåŽ‹äº’感器的二次侧。继电器的动作æ¡ä»¶æ˜¯Mw>MB+Mv(Mv为电压线圈ä¸äº§ç”Ÿçš„力矩)。
æ£å¸¸è¿è¡ŒåŠå¤–部çŸè·¯æ—¶ï¼Œç”±äºŽII=I2,KBL1ã€KBL2由于其å作用力矩Mv和继电器内弹簧å作用力矩Ms的作用,使触点ä¿æŒåœ¨æ–å¼€ä½ç½®ï¼Œä¿æŠ¤ä¸ä¼šåŠ¨ä½œã€‚
当一回线路å‘生故障(如线路L-1çš„K点),由于II>I2,并由于电压大大é™ä½Žï¼Œç”µåŽ‹çº¿åœˆçš„å作用力矩显著å‡å°‘ï¼Œå› æ¤KBL1ä¸ç”±II产生的动作力矩Mw1大于I2产生的制动力矩MB1与电压产生的制动力矩Mv之和,所以KBL1动作,切除故障线路L-1;对于KBL2,由于æµè¿‡å…¶åˆ¶åŠ¨çº¿åœˆçš„电æµII大于工作线圈æµè¿‡ç”µæµI2,å³åˆ¶åŠ¨åŠ›çŸ©å¤§äºŽåŠ¨ä½œåŠ›çŸ©ï¼Œæ‰€ä»¥å®ƒä¸ä¼šåŠ¨ä½œã€‚
必须指出,å•ç«¯ç”µæºçš„åŒå›žçº¿è·¯ä¸Šï¼Œå¹³è¡¡ä¿æŠ¤åªèƒ½è£…于é€ç”µä¾§ï¼Œå—电侧ä¸èƒ½è£…è®¾ã€‚å› ä¸ºä»»ä¸€å›žçº¿è·¯çŸè·¯ï¼Œæµè¿‡å—电侧两个平衡继电器的工作线圈和制动线圈的电æµå¤§å°æ˜¯ç›¸ç‰çš„,ä¿æŠ¤å°†ä¸èµ·ä½œç”¨ã€‚
由于åŒå›žå¹³è¡Œçº¿æ¨ªè”差动ä¿æŠ¤åŠå¹³è¡¡ä¿æŠ¤ï¼Œåœ¨é 近对侧出å£çŸè·¯æ—¶ï¼Œæœ¬ä¾§ä¸¤æ¡çº¿è·¯æµè¿‡çš„电æµï¼Œå…¶ç”µæµçš„横差值,ä¸è¶³ä»¥å¯åŠ¨ä¿æŠ¤ï¼Œåªæœ‰ç‰å¾…对侧的ä¿æŠ¤åŠ¨ä½œï¼Œåˆ‡é™¤æ•…éšœåŽï¼Œæœ¬ä¾§çš„éžæ•…障线电æµé™ä¸ºé›¶ï¼Œæ‰ç”±æ•…障线电æµå¯åŠ¨æœ¬ä¾§ä¿æŠ¤ï¼Œåˆ‡é™¤æ•…障线路。这ç§æƒ…况被称为相继动作。线路上相继动作区域大å°ä¸Žä¿æŠ¤æ•´å®šå€¼åŠçŸè·¯ç”µæµæœ‰å…³ã€‚
横è”差动ä¿æŠ¤ï¼Œå…¶æ–¹å‘继电器接有æ¯çº¿ç”µåŽ‹ï¼Œåœ¨å¹³è¡Œçº¿è·¯å‡ºå£ä¸‰ç›¸çŸè·¯æ—¶ï¼Œç”µåŽ‹ä¸ºé›¶ï¼Œå¦‚æ–¹å‘继电器的电压回路没有良好的记忆作用,便会误动,称为电压æ»åŒºã€‚
(一)“跳闸åŽâ€ä½ç½®
当SA的手柄在“跳闸åŽâ€ä½ç½®ï¼Œæ–路器在跳闸ä½ç½®æ—¶ï¼Œå…¶å¸¸é—触点é—åˆï¼Œ+WCç»FU1 SA11-10 HGåŠé™„åŠ ç”µé˜» QF(常é—) KMC线圈 FU2 -WC。æ¤æ—¶ï¼Œç»¿è‰²ä¿¡å·ç¯å›žè·¯æŽ¥é€šï¼Œç»¿ç¯äº®ï¼Œå®ƒè¡¨ç¤ºæ–路器æ£å¤„于跳闸åŽä½ç½®ï¼ŒåŒæ—¶è¡¨ç¤ºç”µæºã€ç†”æ–器ã€è¾…助触点åŠåˆé—¸å›žè·¯å®Œå¥½ï¼Œå¯ä»¥è¿›è¡Œåˆé—¸æ“作。但KMCä¸ä¼šåŠ¨ä½œï¼Œå› 电压主è¦é™åœ¨HGåŠé™„åŠ ç”µé˜»ä¸Šã€‚
(二)“预备åˆé—¸â€ä½ç½®
当SA的手柄顺时针方å‘旋转90o至“预备åˆé—¸â€ä½ç½®ï¼ŒSA9-10接通,绿ç¯HG回路由(+)WTW SA9-10 HG QF(常é—) KMC
FU2 -WC导通,绿ç¯é—ªå…‰ï¼Œå‘出预备åˆé—¸ä¿¡å·ï¼Œä½†KMCä»ä¸ä¼šå¯åŠ¨ï¼Œå› 回路ä¸ä¸²æœ‰HGå’ŒR。
(三)“åˆé—¸â€ä½ç½®
当SA的手柄å†é¡ºæ—¶é’ˆæ–¹å‘旋转45o至“åˆé—¸â€ä½ç½®æ—¶ï¼ŒSA5-8触点接通,接触器KMC回路由+WC SA5-8 KL2(常é—) QF(常é—)
KMC线圈 -WC导通而å¯åŠ¨ï¼Œé—åˆå…¶åœ¨åˆé—¸çº¿åœˆå›žè·¯ä¸çš„触点,使æ–路器åˆé—¸ã€‚æ–路器åˆé—¸åŽï¼ŒQF常é—触点打开ã€å¸¸å¼€è§¦ç‚¹é—åˆã€‚
(å››)“åˆé—¸åŽâ€ä½ç½®
æ¾æ‰‹åŽï¼ŒSA的手柄自动å时针方å‘转动45o,å¤å½’至垂直(å³â€œåˆé—¸åŽâ€)ä½ç½®ï¼ŒSA16-13触点接通。æ¤æ—¶ï¼Œçº¢ç¯HR回路由 FU1
SA16-13 HR KL线圈 QF(常开) YT线圈 FU2-WC
导通,红ç¯äº®ï¼ŒæŒ‡ç¤ºæ–路器处于åˆé—¸ä½ç½®ï¼ŒåŒæ—¶è¡¨ç¤ºè·³é—¸å›žè·¯å®Œå¥½ï¼Œå¯ä»¥è¿›è¡Œè·³é—¸ã€‚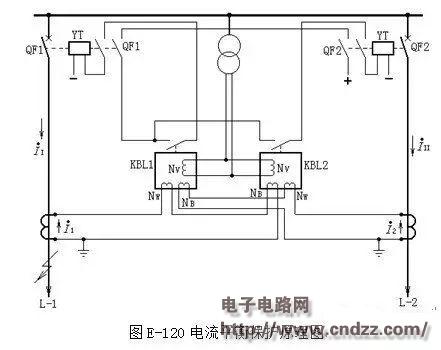
Vision SE is our specialist vision solution offering a wide range of classification services. Through advanced image processing, we realize professional-level visual technology, which is suitable for medical image processing, scientific research and other fields. We focus on performance optimization to make it an industrial-grade solution that is widely used in factory automation and high-demand application scenarios. At the same time, we pay attention to data security and privacy protection, ensuring that the highest standards are met when processing images and data. Vision SE's classified services exceed expectations, providing high-performance and professional-grade vision solutions to various industries.
vision services,vision sensor,vision sense,vision se,vision se review
Ningbo Autrends International Trade Co., Ltd. , https://www.visionsemr.com