In fact, when it comes to ADAS, we first think of things like ACC (adaptive cruise), LDW (lane departure warning), LKA (lane hold), FCW (front car collision warning). These technologies have matured and the products have been mass-produced and are equipped in high-end vehicles in recent years. And these technologies are related to the camera, millimeter wave radar and body controller, and it seems that it has little to do with the map. In fact, if you combine maps, these features will become more powerful. Let's take a few examples.
The ACC is actually set by the driver to a maximum cruising speed. The vehicle is equipped with a front-mounted sensor, such as a camera or millimeter-wave radar, to confirm whether there is a vehicle in the accessible area directly in front of the vehicle. If there is a vehicle, follow the car within the safe braking distance, and if there is no vehicle, accelerate to the set cruising speed. Note that the "in front of the vehicle", that is, the straight direction of the front of the car, should be emphasized. This adaptive cruise function is great if you are driving in a straight line, or if the road curvature is almost as straight.
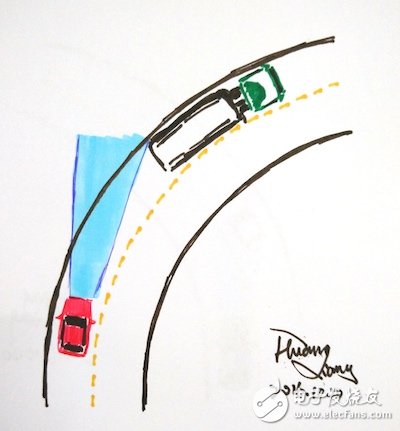
However, if in the curve, as shown below, the sensor of the vehicle in the left lane will mistakenly think that the vehicle in the right lane is in front of itself, and then immediately decelerate. In fact, the vehicle can completely maintain the normal speed and bend.

Or, as shown in the following figure, the vehicle in the left lane does not notice that there is a car in the front corner of the lane. Maybe when the vehicle is going up, or when the front car suddenly brakes, it is too late to slow down, and then it is easy to happen. The accident happened.
In addition, the map can provide the curvature of the road, and the vehicle can decelerate in advance when cornering to ensure safety. Or in the corner, the recognition of the camera can also be targeted to identify the recognition mode to improve the detection accuracy of the lane line or traffic participants. The map can also tell the vehicle when it will enter and leave the tunnel, and the corresponding camera can adjust the exposure in time to ensure continuity of perception.
When driving at night, the vehicle can also automatically adjust the illumination angle of the lights at the corners according to the curvature information provided by the map, or adjust the illumination angle of the lights up and down according to the slope information provided by the map.
On the other hand, many providers of camera recognition currently use the camera to identify the speed limit cards on the road to achieve the speed limit function, but the map can provide better service. For example, the map can not only tell the speed limit of the vehicle on the road section, but also provide the recommended speed when it is dangerous to the road, bridges, tunnels, and up and down ramps. Not only that, but you can also refine the recommended speed to each lane. It is also necessary to emphasize that in the case of active safety and automatic driving, the recommended driving speed is more practical than the speed limit of the road.
Based on the slope data, the vehicle can be throttled before the uphill slope, so that it accelerates properly, and when it reaches the top of the slope, the throttle is reduced, and when the slope is down, it is not refueled. The Horizon's Electronic Horizon is based on the above, and is said to save up to 3%. This function is more prominent in the savings of daily operating costs for commercial vehicles and logistics companies.
There are also more basic autonomous driving that can be implemented based on maps. For example, in the automatic driving scene of a highway, when driving in a straight line or when driving in a lane, the vehicle is completed by the main function of ADAS, that is, ACC+LKA+FCW. When a lane change is required, the command of the lane change can be a manual turn signal or a lane change of the autopilot system.
At this time, the lane information provided by the map confirms whether the area of ​​the current vehicle can be changed. If you want to go down the road, the map can inform the vehicle in front of the ramp at a great distance. At this time, the vehicle has enough time to borrow the map data and slowly lean to the rightmost lane to prepare for the ramp. And if you don't go down the ramp, or there is a place to flow into the traffic, the traffic can also have enough time to lean in the far left lane to ensure the safety of the traffic.
In addition to this, there are a large number of application methods for brain openings. Next time, we will introduce the technical solutions implemented by the map in ADAS and the working principle of ADASIS.
Substation Transformer,Prefabricated Substation,High Quality Prefabricated Substation,European Type Substation
Hangzhou Qiantang River Electric Group Co., Ltd.(QRE) , https://www.qretransformer.com