Urban roads are intricate and intertwined, and traffic lights are an important command system for urban traffic. As an effective means to control traffic flow and improve road traffic capacity, traffic lights have obvious effects on reducing traffic accidents. However, the traffic volume is changing at any time, while the traditional traffic light mode uses timing control, which is easy to cause traffic jams. Therefore, we need to set the transit time according to different traffic conditions. This paper uses fuzzy control algorithm to design an intelligent traffic light monitoring system.
1, the overall planThe traffic light monitoring system is a distributed, distributed, and networked monitoring system, including a monitoring center and several intelligent monitoring terminals, capable of centralized monitoring and maintenance management of independently distributed traffic lights. Each intersection is seen as a monitoring terminal, each with a collector and a GPRS module, and a controller is installed in each direction. The controller is used to directly control the status of the traffic light, the time display, and obtain the vehicle information of each lane; the collector is used to acquire data of each controller of the subordinate and send a control command. The collector sends the collected data to the monitoring center through the GPRS network, and analyzes the data in the monitoring center to realize the monitoring of the road condition. Here, the fuzzy control algorithm is used to analyze the vehicle data to realize the control of the traffic lights.
2, fuzzy control algorithm designFuzzy control is the use of people's long-term experience as a control strategy, and it is transformed into a machine-recognizable natural language to achieve automatic control. In the paper, the man-transformed traffic command strategy language is transformed into the control algorithm described by machine language, which makes the algorithm can simulate the human mind to analyze the time allocation problem of each lane well, so as to realize the variable control of the traffic light time. For a crossroad, a cycle is divided into four phases, as shown in Figure 1 (1: east to west, west to east, west to south, east to north; 2: west to north, east to south; 3: South to North, North to South, South to East, North to West; 4: North to East, South to West).
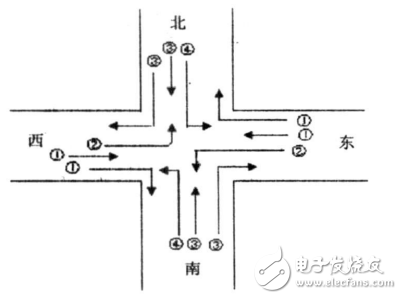
Figure 1 Crossroads
2.1, input and output variable definitionThe linguistic variables of fuzzy control are for input variables and output variables. They are natural language forms, not variables given in numerical form. The current phase waiting vehicle average and the next phase vehicle waiting average are selected as input variables. The current phase green light delay time is the output language variable, so that a two-input single-output two-dimensional fuzzy controller is selected, as shown in FIG. 2 .
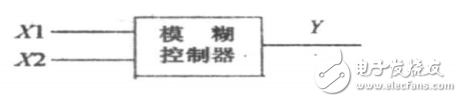
Figure 2 Dual input single output model
In the figure, X1: the current total number of vehicles / number of lanes (rounded);
X2: total number of vehicles in the next phase / number of lanes (rounded);
Y: The current phase green light shows the time.
2.2, variable settings(1) Input amount: X1 and X2.
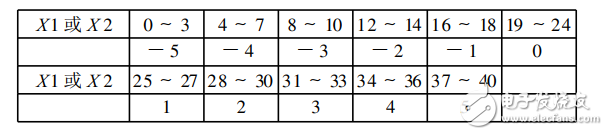
The basic domain of the average number of vehicles waiting is determined as [0, Qmax], and Qmax is the maximum number of waiting vehicles that can be accepted. According to the actual situation and road conditions, 40 is selected here. The domain is the quantized number of linguistic variables, and the domain that waits for the average number of vehicles is determined as {-5,-4,-3,-2,-1,0,1,2,3,4,5}, input A comparison table between the basic domain and the discrete domain of the linguistic quantity is shown in Table 1.
Table 1: Basic domain and discrete domain conversion table for the average number of vehicles input
(2) Output: Y, the current phase green light delay time.
The basic domain of the green light delay time is determined as [Gmin, Gmax], Gmin is the acceptable minimum green light delay time, and Gmax is the acceptable maximum green light delay time. Here, Gmin=0s, Gmax=60s is set. . The domain of the green light delay time is determined as {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12}. Since the output delay time is continuous, there is a scaling factor K=60/12=5, which is defuzzified by the scaling factor, resulting in an accurate delay time:
Delay time = K & TImes; fuzzy set data
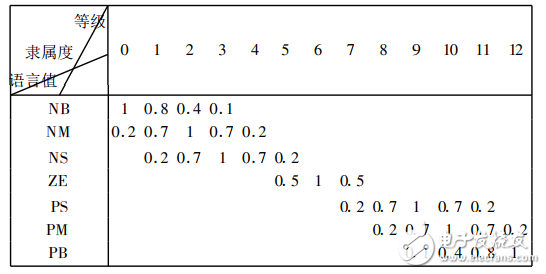
2.3, membership functionIn the text, the linguistic variables of X and Y are selected from 7 language values, "rare" - "NB", "less" - "NM", "less" - "NS", "normal" - "ZE", " More" - "PS", "more" - "PM", "many" - "PB".
According to the membership function, an assignment table of the corresponding language variable can be established. The determination of the membership function is generally determined based on experience or statistics, and can also be given by experts and authorities. Table 2 and Table 3 give the assignment tables for the respective language variables of the input and output.
Table 2 Language variable assignment table for input quantity X
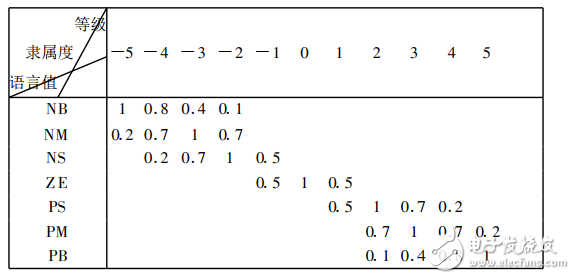
Table 3 Language variable assignment table for output Y
We supply vape 2000 puffs disposable,all these disposable pen comes with 2000-3000 puffs per device which last longer than various other disposables on the market. The 2000 puffs on an average can be consumed.
We have a variety of well-known brands of disposable e-cigarettes.
Good Taste Iget Max Vape 16 Flavors 8ml;The XXL Bang Vape features an 800mAh internal battery and 6ml of vape juice with up to 2000 puffs!
Vape 2000 Puffs,Hqd Vape ,Vape Rechargeable ,Relx Vape
Tsvape E-cigarette Supplier Wholesale/OEM/ODM , https://www.tsecigarette.com